1. 引言
slam (simultaneous localization and mapping,同步定位与建图)技术指的是通过传感器感知周边环境并通过估计传感器位置的变化来构建环境地图的技术。移动机器人的定位与导航,无人驾驶中的记忆泊车等功能均依赖于slam技术。视觉slam技术指的就是以视觉传感器作为主要数据输入的slam技术,如单目、双目、深度摄像机等。
视觉slam中,用于获取传感器位置变换的部分一般为视觉里程计(也被称为前端)和后端优化部分。其中,前端通过图像特征在单帧或多帧之间的变化来初步估算出相机的位姿变化。而后端优化部分则使用多帧之间的变化进行位姿约束优化,从而得到一个相对精确的位置变化信息 [1]。
一般用于维持后端优化进行里程计优化的依据为图像中的不变特征点,而这些特征点的提取和匹配均依赖于传统的图像处理算法,如像素亮度对比等。随着深度学习在图像处理算法方面的应用,现有的算法已经可以通过先验模型对图像中的像素点做出更为准确的界定,且这些像素点在不同的图片中均能保持同类别界定,如能够将图片中的像素点均做出分类的语义分割模型。
因此,如何利用语义分割网络,在多帧图片之间维持对特定像素点的同一分类检测结果,并以此为依据提供对相机位置变换的约束优化,从而与现有的里程计优化算法结合,为现有的视觉slam提供更为准确的里程计优化结果,将会是本文的主要研究内容。
2. 相关工作
视觉slam算法按照传感器的不同组合分为了不同的发展方向,如单目、双目以及多传感器融合等。而在语义slam算法方面,其发展方向主要由语义信息与传统slam的结合点来进行区分,一般主要集中于语义地图构建以及语义视觉里程计方面。
2.1. 语义slam
语义slam指的是通过在传统的slam系统中添加语义信息从而实现优化现有的slam流程或者是添加额外功能的技术。早期的研究者们认为语义slam即是在对物体进行三维重构时精确恢复出物体的细节及语义。如valentin等 [2] 提出了使用crf (conditional random field,条件随机场)为物体添加语义信息的方式。此后的研究者提出依靠语义信息以辅助slam系统中的一些模块,如zhao等 [3] 使用了语义信息优化了slam算法中的视觉里程计。构建语义地图同样也是语义slam的研究目标之一,如mccormac等 [4] 提出的结合cnn以及条件随机场的语义地图构建算法。
2.2. 语义视觉里程计
本文的主要研究内容为语义slam中的语义里程计优化部分。关于此部分的研究内容,典型的为kevin [5] 等提出的使用dpm (deformable parts model,可形变部件模型)结合传统slam做概率融合从而优化视觉slam。此后,lianos等 [6] 提出的vso则是使用距离变换将分割结果的边缘作为约束从而优化视觉里程计。而li等 [7] 提出基于对目标的检测结果构建和地图构建模块融合的优化项,从而构建一个整体的优化问题。而stenborg等 [8] 提出了依靠语义检测结果在现有的slam算法中做定位优化的思路。
3. 语义优化算法研究
在视觉slam算法中,进行里程计估计喝优化的依据一般为图像中的通用特征,一般为点或线等特征。通过匹配这些特征进行计算和优化。而在引入了语义分割网络后,图像在通用特征点之外还包括了语义网络检测出的像素语义信息,在进行里程计的计算与优化时,同样也可以以此为依据对算法估计出的里程计进行优化。在进行里程计的初步计算时,由于实时性和计算效率的要求,此部分并不适合加入语义分割的检测结果。而里程计的优化一般为一个频繁的迭代优化过程,其中主要的计算消耗为迭代优化部分,且执行的频率相对较低,因此在此部分引入语义分割结果对整个算法效率造成的影响较小。
3.1. 累计误差消除算法
在里程计的优化部分主要做的工作为对初步的里程计信息进行误差优化,即对于估计过程产生的累计误差进行消除。通过对一般视觉里程计的原理进行分析,无论是基于特征点法还是基于直接法,由于光照和相机角度的影响,初步进行匹配计算出的里程计信息均存在一定的误差。而随着相机的运动逐渐叠加,这种细微误差会逐渐累计,大量的累计误差积累将会使得整个算法的整体误差逐渐扩大,最终使得slam算法完全不能估计出相机所处的位置,对地图的构建与定位造成巨大的影响。
通用的累计误差消除算法为最小化重投影误差算法。其核心思想为:在相机的不同状态,对于空间中的坐标点观测信息经过转换后应能保证基本重合(误差处于可接收范围内)。即在估计出的相机运行信息下,通过计算点在当前图片中的位置与变换后图片上位置的差值并进行优化从而得出较为精确的里程计信息。对于在两张不同图片上的同一点的确定同样依赖于对图片中的通用特征进行提取。
3.2. 语义代价函数
在一般的视觉slam算法中,对于里程计的优化问题一般可以概括为一个非线性优化问题,而为了进行优化,则需要定义一个待优化求解的代价函数,该函数需要能正确衡量误差与估计值的关系。对于语义优化约束来说,本文采取类似于最小化重投影误差的方法,与其不同的是,进行误差比较的依据为图片中的语义分类信息。
(1)
如公式(1)所示,将点投影到图像
中,该点类别为c的概率,而
和
分别表示里程计以及点的坐标。如果类别相同,则概率较大,如果类别不同,定义公式(2)表示概率与最近的类别为c的点之间距离的关系,dt用来表示这个距离。
(2)
因此,可以用公式(3)表示语义代价函数。其中
表示点是类别c的概率。
(3)
以上公式基于语义网络对目标的边界检测较为准确的情况,但是在实际环境中,由于语义分割网络对目标进行分割的不确定性,并不能完全依靠边界信息作为多帧之间不变性的依据,因此,引入其他结果对其进行约束是很有必要的。不难发现,语义网络对于边界的检测波动较大,但是对于整个目标位置与轮廓的确认则较为精确,因此可以将其作为一个约束项加入到代价函数中。定义点在图片帧中与语义网络检测类别为c的结果质心的距离如公式(4)所示。
(4)
结合公式(3)和(4),最终得出的语义代价函数如公式(5)所示,其中
为超参数,根据目标的多少适当调整质心距离对语义代价函数的影响。
(5)
3.3. 优化与求解
公在定义了待求解的代价函数后,需要对函数进行优化求解从而优化初步的里程计信息。对于类似的复杂代价函数,一般使用em (expectation maximization,期望最大化)的算法进行优化 [9]。即根据观测的数据估计初步参数,再根据估计出的参数计算未观测数据。之后再次进行估计,逐步迭代至算法收敛。
对于本文中的代价函数,按照e和m两个步骤去求解。在e步骤中,对每个地图点求解权重向量,固定点的位置和里程计。而在m步骤中,保持权重不变,优化点的位置和里程计。通过这种方式逐步完成对代价函数的优化。
4. 语义优化算法实现与实验
4.1. 语义约束优化算法实现
语义约束优化算法需要与现有的视觉slam进行结合,通过同时考虑重投影误差 [10] 以及语义误差,最终构建出对于里程计信息的联合优化。算法流程的伪代码如图1所示。
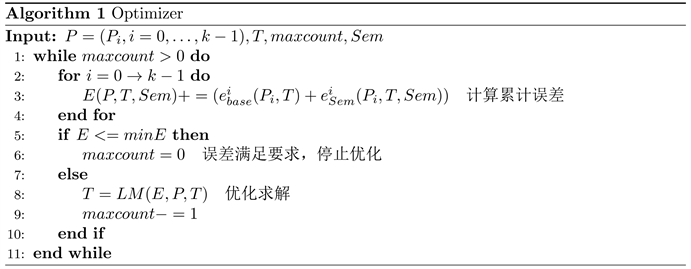
. pseudocode of semantic constraint optimization process
图1. 语义约束优化流程伪代码
对于每一次约束优化,传入的信息为确定进行优化的点的位置p,此刻的里程计数据t,最大迭代次数maxcount。算法首先根据公式(5)构建待求解的累计误差,此后在步骤8使用lm (levenberg-marquardt,列文伯格–马夸尔特)算法进行求解 [11],并进行计数,知道误差满足条件或者迭代次数达到最大,则结束优化,并使用优化后的结果更新里程计数据。
4.2. 语义约束优化算法实验
为了验证算法的优化效果,本文使用基于ros (robot operating system,机器人操作系统)的机器人分别在数据集和实际环境中进行算法的实验。该机器人搭载深度摄像机并运行于室内环境。数据集的测试使用tum [12] 数据集,该数据集包含使用高精度传感器记录的里程计信息。而在实际环境中的测试使用机器人的编码器和imu的数据融合作为数据参照。算法的语义分割输入依赖实时的rgbd语义分割网络:esanet [13]。机器人分别使用orbslam3 [14]、orbslam3 vso以及基于本文优化算法的orbslam3进行里程计估计。使用相对姿态误差作为衡量的大小最终得出的实验结果如表1所示。
. experiment result
表1. 实验结果
5. 结论
本文研究了视觉slam中的常见问题:即视觉slam中的视觉里程计以及后端优化问题。文中介绍了语义slam以及语义视觉里程计的发展现状,并分析了语义里程计进行优化约束的必要条件。通过引入语义分割网络,本文在语义视觉里程计的基础上,提出了一种改进的语义视觉里程计优化算法。该算法通过构建语义约束代价函数,并对此函数进行优化求解,从而辅助优化原有视觉slam算法中的里程计。经过实际实现和测试,证明了该算法可以与现有的slam算法结合并进行优化,优化结果相较于作为基础的语义视觉里程计,其对于里程计误差的优化占比拥有了1%~2%的提升。
致谢
在完成本论文的过程中,很多人在不同层面上给予了很多帮助。首先要感谢我的导师在研究期间的指导。同时,感谢实验室其他小伙伴的交流与启发,正是因为你们的帮助我才能完成本论文。同时,也对参与论文评审的专家老师和参与排版的编辑们表示感谢。